Smart Car
We participated in the National College Student Smart Car Competition in groups of three.
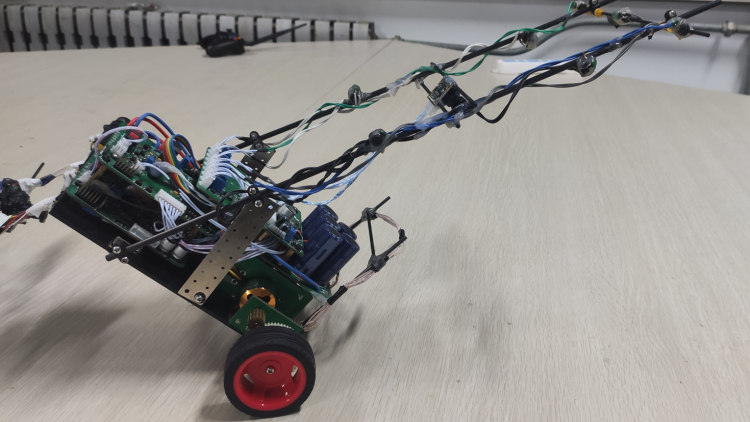
We built a two-wheeled balance car, which can move upright on two wheels, automatically track along the electromagnetic wire, charge wirelessly through the coil, and pass through complex road sections (such as roundabouts,sharp turns, ramps, etc.).
The smart car was based on STC8A8K (a kind of MCU) and was developed in C language.We developed a driver library for peripherals (such as GPIO, SPI, UART, ADC, PWM, etc.) based on STC’s DATASHEET.
I was responsible for the embedded software part in the group.
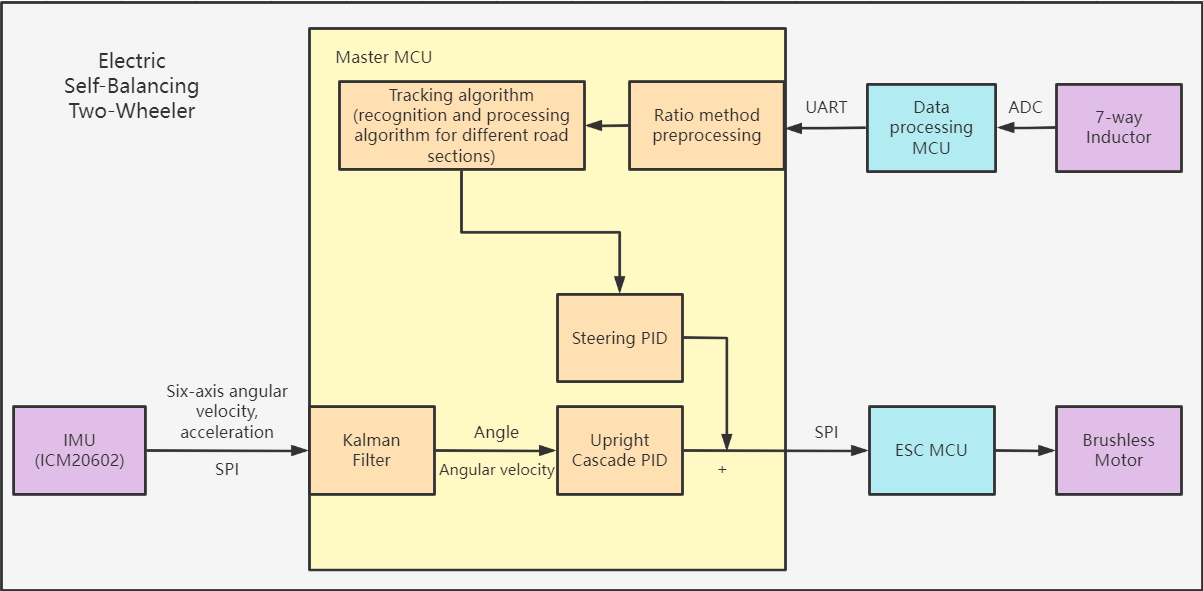
Control logic block diagram of Smart Car:
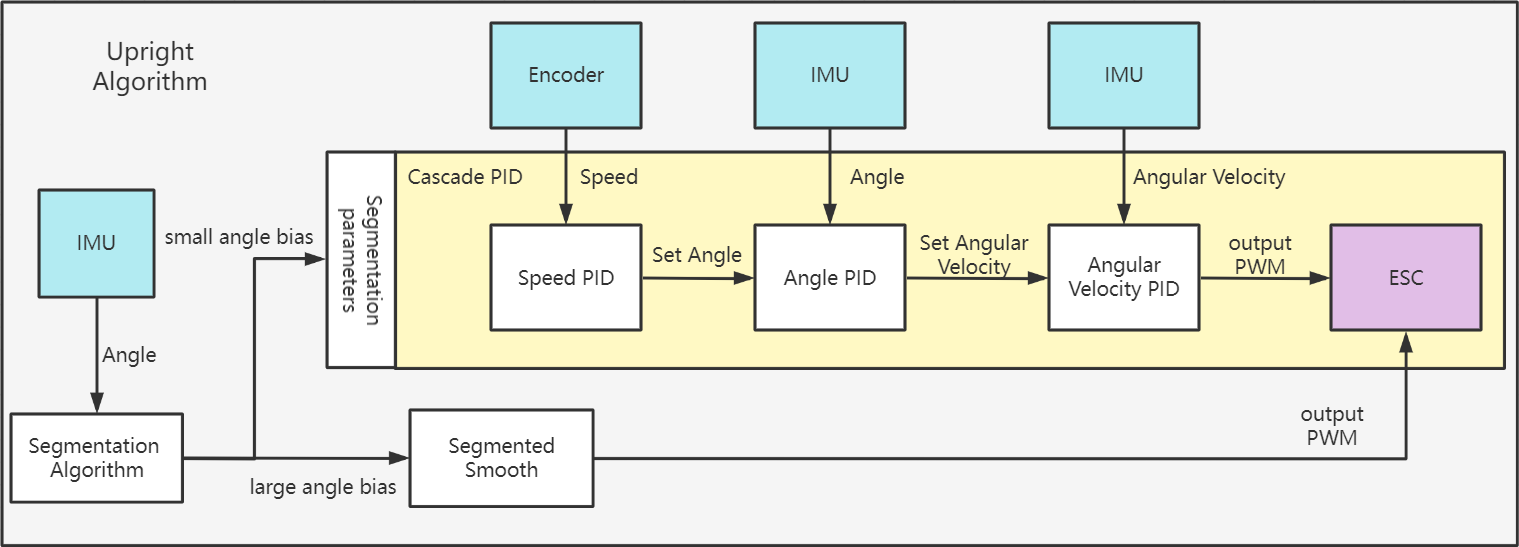
Two-Wheel Upright Algorithm:
Physical map of our Smart Car: